Hãy nhập câu hỏi của bạn vào đây, nếu là tài khoản VIP, bạn sẽ được ưu tiên trả lời.


Tham khảo:
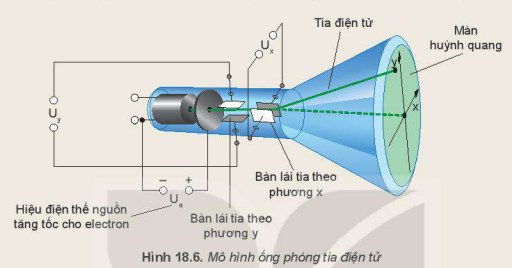
Ta thấy rằng quỹ đạo chuyển động của điện tích khi bay vào trong điện trường đều phụ thuộc vào vận tốc ban đầu, cường độ điện trường giữa hai bản phẳng điện trường.
- Hiệu điện thế Ua cho phép người ta điều chỉnh vận tốc ban đầu vị của điện tử.
- Hiệu điện thế Uy trên bản lái tia theo phương y cho phép chúng ta điều chỉnh quỹ đạo của tia điện tử theo phương y. Khi cố định Ua và đặt vào hai bản lái tia theo phương y một điện áp biến đổi, ta sẽ thấy điểm hiển thị của tia điện tử trên màn hành có toạ độ y biến đổi theo điện áp bên ngoài. Người ta cũng có thể cố định điện áp trên bản lái tia theo phương y và sử dụng Ua là một điện áp biến đổi cũng thu được kết quả tương tự.
- Thay đổi hiệu điện thế Ux trên hai bản lái tia theo phương x thường được thiết lập để cho điểm hiển thị của tia điện tử trên màn hình có toạ độ tăng dần theo phương x. Trong nhiều trường hợp trục Ox chính là trục thời gian.
- Dưới sự điều khiển của các bản lái tia, hình ảnh hiển thị trên màn huỳnh quang sẽ mô tả tín hiệu đầu vào là hiệu điện thế Uy và Ux được đặt vào các bản lái tia.
Tham khảo:
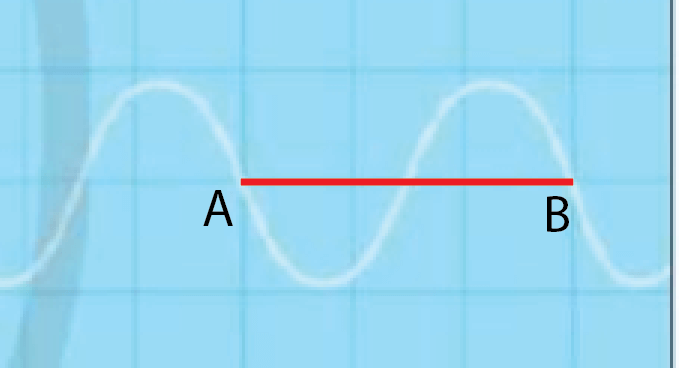
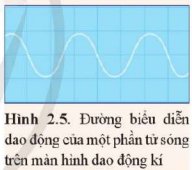
Dựa vào đồ thị ta thấy từ A đến B là một dao động hoàn chỉnh, khi đó ta có thể xác định được chu kì của dao động tương ứng vời 3 ô.
\(T=3ms\Rightarrow f=\dfrac{1}{3\cdot10^{-3}}=333,3Hz\partial\)
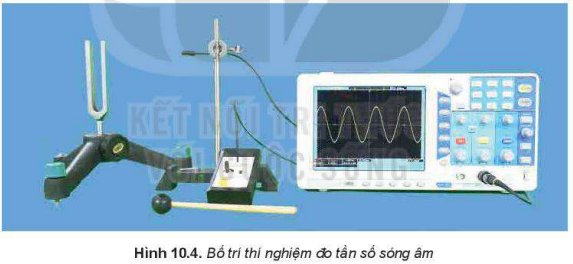
1. Âm thanh tạo ra từ âm thoa làm các phân tử không khí dao động truyền lời micro hoặc cảm biến âm thanh tạo ra dòng điện dao động, tín hiệu này được đưa vào dao động ki và hiển thị trên màn hình dạng đồ thị
2. Vì thí nghiệm đã biến đổi dao động cơ thành dao động điện nhờ micro, đưa tín hiệu từ micro vào dao động kí điện tử, hình ảnh thu được trên màn hình của dao động kí chính là đồ thị biểu diễn dao động âm.
3. Thiết phương án thí nghiệm và bố trí thí nghiệm như hình 10.4:
Nối micro và bộ khuyếch đại tín hiệu vào dây đo.
Nối dây đo vào cổng tín hiệu của dao động kí điện tử.
Đặt TRGGER MODE ở chế độ AUTO.
Điều chỉnh VOLTS/DIV cho tới khi thấy sóng trên màn hình.
Đặt micro cách âm thoa một khoảng 20 cm, dùng búa cao su gõ âm thoa.
4. Thực hiện thí nghiệm trong môi trường yên tĩnh, đặt âm thoa và micro trong hộp cách âm.
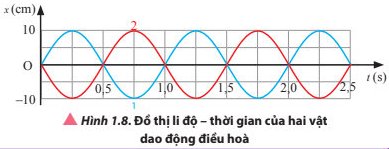
Hai dao động có cùng biên độ.
Ở cùng một thời điểm khi dao động 1 ở vị trí cân bằng thì dao động 2 ở vị trí bên và ngược lại.
Điều kiện để quan sát được hệ vân giao thoa: là hai sóng phải xuất phát từ hai nguồn dao động có cùng tần số, cùng phương dao động và có độ lệch pha không đổi theo thời gian.

Tham khảo:
Phương án thí nghiệm:
- Sử dụng một âm thoa, búa cao su.
- Đặt âm thoa gần bộ cảm biến âm một khoảng vừa đủ, dùng búa cao su gõ nhẹ vào âm thoa, bộ cảm biến âm sẽ nhận sóng âm từ âm thoa và xử lí tín hiệu cho ta đồ thị dao động của sóng âm.
- Do đã cài đặt tỉ lệ trục thời gian ban đầu ta có thể xác định được chu kì của tín hiệu.
- Từ đồ thị xác định được bước sóng (khoảng cách giữa hai đỉnh sóng liên tiếp).
- Từ đó xác định được tốc độ truyền âm và tần số của âm thoa.

a) Biên độ dao động A=0,2 cm
Chu kì T=0,4 s
Tần số \(f = \frac{1}{T} = \frac{1}{{0,4}} = 2,5Hz\)
Tần số góc của dao động \(\omega = \frac{{2\pi }}{T} = \frac{{2\pi }}{{0,4}} = 5\pi rad/s\)
b) Li độ của vật dao động tại các thời điểm t1, t2, t3 ứng với các điểm A, B, C trên đường đồ thị li độ – thời gian lần lượt là x1=-0,1 cm, x2= -0,2 cm, x3= 0 cm.
c) Vì gốc thời gian trùng với vị trí cân bằng nên li độ cũng chính là độ dịch chuyển từ vị trí cân bằng đến vị trí của vật tại các điểm A, B, C.
Từ đồ thị ta thấy: T = 3 ms = 0, 003 s ⇒f = \(\frac{1}{T}\) =\(\frac{1}{{0,003}}\)= \(\frac{{1000}}{3}\) (Hz)
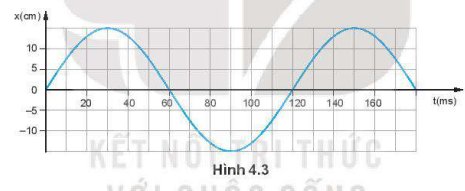
a) Biên độ A = 15 (cm)
Chu kì T = 120 (ms) = 0,12 (s)
Tần số f = \(\frac{{25}}{3}\) (Hz)
Tần số góc ω = \(\frac{{2\pi }}{T}\) = \(\frac{{2\pi }}{{0,12}}\)= \(\frac{{50\pi }}{3}\) (rad/s)
Pha ban đầu φ = \( - \frac{\pi }{2}\)
b) Phương trình dao động của vật là: x = 15cos(\(\frac{{50\pi }}{3}\)t −\(\frac{\pi }{2}\)) (cm)
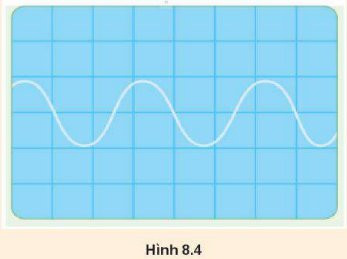
Trên màn hình ta thấy 1 chu kì có 4 ô nên T = 4 ms ⇒ \(f = \frac{1}{T} = \frac{1}{{0,004}}\)= 250 (Hz)