Hãy nhập câu hỏi của bạn vào đây, nếu là tài khoản VIP, bạn sẽ được ưu tiên trả lời.








Đáp án B
Độ cứng của các lò xo sau khi cắt


Biên độ dao động của các vật


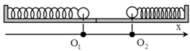
Với hệ trục tọa độ như hình vẽ (gốc tọa độ vị trí cân bằng của vật thứ nhất), phương trình dao động của các vật là

![]()
d nhỏ nhất khi


![]()
Mặt khác



![]()

Đáp án B
+ Hiệu suất truyền tải điện năng
H = P - Δ P P = 1 - Δ P P → P 1 = 0 , 9 P 1 + 90 P 0 P 2 = 0 , 8 P 2 + 90 + n P 0 ⇒ 0 , 9 P 1 = 90 P 0 0 , 8 P 2 = 90 + n P 0 1 .
Trong đó P 1 , P 2 lần lượt là công suất truyền đi trước và sau khi nhập thêm n máy và P 0 là công suất tiêu thụ mỗi máy
+ Mặc khác Δ P = P 2 R U ⇒ Δ P 1 Δ P 2 = P 1 P 2 2 = 1 - H 1 1 - H 2 P 1 P 2 ⇒ P 1 P 2 = 1 - 0 , 9 1 - 0 , 2 = 1 2
→ Thay vào (1), ta tìm được n=70
Đáp án B
Biên độ dao động của các vật là:
Với hệ trục tọa độ như hình vẽ (gốc tọa độ tại vị trí cân bằng của vật thứ nhất), phương trình dao động của các vật là:

d nhỏ nhất khi
Mặt khác:

Đáp án B
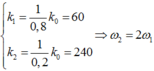
+) Độ cứng của lò xo sau khi cắt k 1 = 1 0 , 8 k 0 = 60 k 2 = 1 0 , 2 k 0 = 240 ⇒ ω 2 = 2 ω 1
Biên độ dao động của các vật là: A = 2 E k ⇒ A 1 = 10 6 3 c m A 2 = 5 6 3 c m
Với hệ trục tọa độ như hình vẽ (gốc tọa độ tại vị trí cân bằng của vật thứ nhất), phương trình dao động của các vật là:
x 1 = 10 6 3 cos ω t + π x 2 = 5 6 3 cos 2 ω t + 15 ⇒ d = x 2 − x 1 = 10 6 3 cos 2 ω t + 10 6 3 cos ω t + 15 − 10 6 3
d nhỏ nhất khi cos ω t = − 1 2 ⇒ d min = 3 , 77 c m
Mặt khác: x = cos ω t = cos k 1 m t = − 1 2
⇔ 5 6 t = ± 2 π 3 + k 2 π ⇒ t min = 0 , 171 s