Hãy nhập câu hỏi của bạn vào đây, nếu là tài khoản VIP, bạn sẽ được ưu tiên trả lời.


a) Dao động 1 (đường màu xanh) có:
- Biên độ: A1 = 3 cm
- Chu kì: T = 6 s
- Tần số: \(f=\dfrac{1}{T}=\dfrac{1}{6}\left(Hz\right)\)
Dao động 2 (đường màu đỏ) có:
- Biên độ: A2 = 4 cm
- Chu kì: T = 6 s
- Tần số: \(f=\dfrac{1}{T}=\dfrac{1}{6}\left(Hz\right)\)
b) Hai dao động có cùng chu kì nên \(\omega=\dfrac{2\pi}{T}=\dfrac{2\pi}{6}=\dfrac{\pi}{3}\left(rad/s\right)\)
Độ lệch thời gian của hai dao động khi cùng trạng thái: \(\Delta t=2,5s\)
Độ lệch pha: \(\Delta\varphi=\omega.\Delta t=\dfrac{\pi}{3}\cdot2,5=150^o\)
c) Tại thời điểm 3,5 s vật 2 đang ở VTCB nên vận tốc cực đại:
\(v=\omega A_2=\text{ }\dfrac{\pi}{3}\cdot4=\dfrac{4\pi}{3}\left(cm/s\right)\)
d) Tại thời điểm 1,5 s vật 1 đang ở biên dương nên gia tốc có giá trị:
\(a=-\omega^2A_1=-\dfrac{\pi^2}{9}\cdot3=-\dfrac{\pi^2}{3}\left(cm/s^2\right)\)
Độ lớn gia tốc khi đó là \(\dfrac{\pi^2}{3}cm/s^2\)
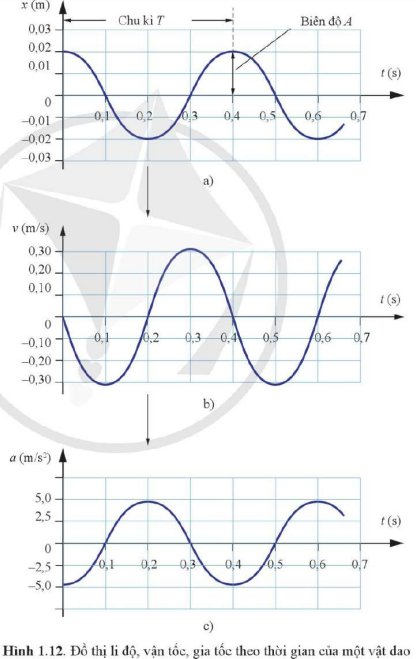
`***` Hình `a`:
`a, \omega =[2\pi]/[0,4]=5\pi (rad//s)`
`b, A=0,03(m)=3(cm)`
`c, v_[max]=5\pi .3=15 \pi(cm//s)`
`d, a_[max]=(5\pi)^2 .3=75 \pi^2 (cm//s^2)`
`***` Hình `b`:
`a, \omega =[2\pi]/[0,4]= 5 \pi(rad//s)`
`b, A=[0,3]/[5\pi]=3/[50 \pi] (m)=6/[\pi] (cm)`
`c, v_[max]=30 (cm//s)`
`d, a_[max]=30.5\pi=150\pi (cm//s^2)`
`***` Hình `c`:
`a, \omega=[2\pi]/[0,4]=5\pi (rad//s)`
`b, A=5/[(5\pi)^2]=1/[5\pi^2] (m)`
`c, v_[max]=5\pi . 1/[5\pi^2]=1/[\pi] (m//s)`
`d, a_[max]=5(m//s^2)`

a) Chu kì và tần số góc của con lắc.
Chu kì T = 1,2 s
Tần số góc là:
\(\omega=\dfrac{2\pi}{T}=\dfrac{2\pi}{1,2}=5,24\left(rad/s\right)\)
b) Vận tốc cực đại của vật.
Theo đồ thì biết biên độ A = 0,35
\(v_{max}=0,35\left(m/s\right)\)
c) Cơ năng của con lắc.
\(W=\dfrac{1}{2}mv_{max}^2=\dfrac{1}{2}\cdot0,2\cdot0,35^2=0,012\left(J\right)\)
d) Biên độ của vật.
\(A=\dfrac{v_{max}}{\omega}=\dfrac{0,35}{5,24}=0,067\left(m\right)\)
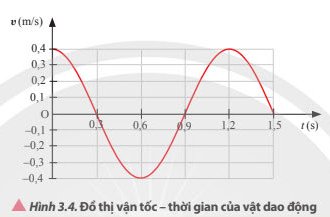
Tốc độ cực đại của vật trong quá trình dao động là 0,4 m/s
Thế năng cực đại của vật trong quá trình dao động là
\(W_đ=\dfrac{1}{2}mv^2=\dfrac{1}{2}.2.0,4^2=0,16\left(J\right)\).

a) Biên độ dao động A=0,2 cm
Chu kì T=0,4 s
Tần số \(f = \frac{1}{T} = \frac{1}{{0,4}} = 2,5Hz\)
Tần số góc của dao động \(\omega = \frac{{2\pi }}{T} = \frac{{2\pi }}{{0,4}} = 5\pi rad/s\)
b) Li độ của vật dao động tại các thời điểm t1, t2, t3 ứng với các điểm A, B, C trên đường đồ thị li độ – thời gian lần lượt là x1=-0,1 cm, x2= -0,2 cm, x3= 0 cm.
c) Vì gốc thời gian trùng với vị trí cân bằng nên li độ cũng chính là độ dịch chuyển từ vị trí cân bằng đến vị trí của vật tại các điểm A, B, C.
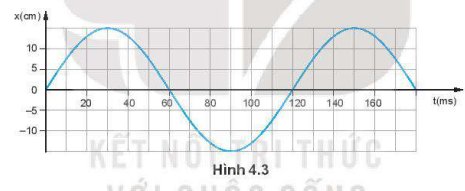
a) Biên độ A = 15 (cm)
Chu kì T = 120 (ms) = 0,12 (s)
Tần số f = \(\frac{{25}}{3}\) (Hz)
Tần số góc ω = \(\frac{{2\pi }}{T}\) = \(\frac{{2\pi }}{{0,12}}\)= \(\frac{{50\pi }}{3}\) (rad/s)
Pha ban đầu φ = \( - \frac{\pi }{2}\)
b) Phương trình dao động của vật là: x = 15cos(\(\frac{{50\pi }}{3}\)t −\(\frac{\pi }{2}\)) (cm)
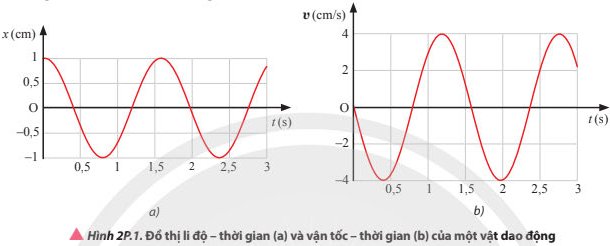
Từ đồ thị ta xác định được A = 1cm
Ta có: vmax = ωA⇒ω = 4 (rad/s)
Phương trình li độ của dao động: x = cos(4t) (cm)
Phương trình vận tốc của dao động: v = 4cos(4t+\(\frac{\pi }{2}\)) (cm/s)
Phương trình gia tốc của vật dao động: a = 16cos(4t) (m/s2)
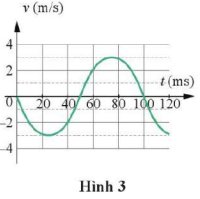
a) Chu kì T = 100 ms = 0,1 s
b) Vận tốc có độ lớn cực đại: vmax = 3 m/s
c) Tần số góc: $\omega = \frac{2 \pi}{T} =\frac{2 \pi}{0.1} = 20 \pi (rad/s)$
Biên độ của dao động: $A=\frac{v_{max}}{\omega} =\frac{3}{20 \pi} \approx 0,048m$
Cơ năng của vật dao động:
$W=W_{dmax}=\frac{1}{2}mv^{2}_{max}\frac{1}{2}.0,15.3^{2}=0,675J$
d) Tại thời điểm 100 ms vận tốc bằng 0 và đang đi theo chiều âm nên vật có vị trí tại biên dương.
Khi đó gia tốc:
$a=-\omega ^{2}A=-(20 \pi)^{2}.0,048=-19,5 m/s^{2}$